CHAPTER 4 A Surgical Robotics in Otolaryngology
History of Robotics
The origins of robotics may be traced to early in the twentieth century, when the Czechoslovakian Capek brothers introduced the concept of automated devices. Joseph Capek wrote the short story “Opilec” in which automats were described, and Karel Capek wrote “Rossum’s Universal Robots.” This introduction of the term robot (deriving from the Czech word robota, which means serf or laborer) was part of a fictional depiction of the increasing sophistication of robots, which eventually rose up against their human inventors.1
The next seminal spark of the collective imagination of scientists and society alike occurred with Isaac Asimov’s collection of short stories in the 1940s.2 He developed the three laws relating to robot behavior, which were recently popularized in Will Smith’s “I, Robot”:
Simultaneous with sensational depictions of the potential for common robotic applications, gradual and stepwise breakthroughs in electronics and computers paved the way for the development and production of the first meaningful robot in 1958, dubbed “the Unimate” by General Motors. Its use in assembly lines to facilitate automobile production in 1961 was the first in what eventually became widespread application of automation in the automobile industry. Honda has been particularly innovative in its development of robotic humanoids, culminating in the ASIMO, which not only can walk but also can negotiate stairs (Fig. 4A-1).

Figure 4A-1. The ASIMO from Honda is a humanoid robot that is capable not only of walking, but of negotiating stairs.
Definitions
As the presence of robotics in the operating room becomes more pervasive, a basic knowledge of the language of robotics is desirable. The following terms represent the essential foundation of robotic lexicography3:
History of Medical Robotics
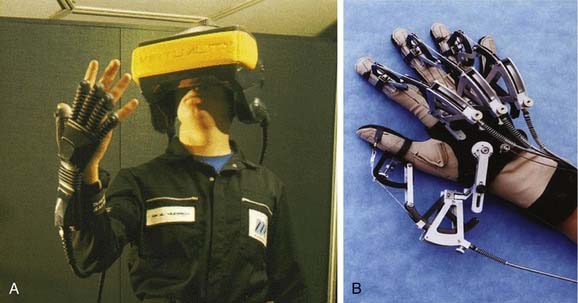
While the earliest applications of robotics were in the automobile industry, the Department of Defense recognized the potential value of remotely controlled robotics, both for the military options they afforded and for the possibility of providing care to wounded soldiers on the battlefield with the surgeon safely out of harm’s way. This concept of so-called virtual insertion of the surgeon into the battlefield was championed and funded by the Pentagon’s Defense Advanced Research Projects Agency (DARPA). Similarly, the National Aeronautics and Space Administration (NASA) teamed up with the Ames Research Center (Mountain View, CA) and the Stanford Research Institute (Palo Alto, CA) to develop both a head-mounted virtual reality display (Fig. 4A-2A) and a data-glove (see Fig. 4A-2B), by which the user could cause and witness his own interactions within a virtual environment.
Less sophisticated technology was used to accomplish the first robot-assisted surgical procedure in 1985, a stereotactic brain biopsy.1 In 1992, the Robodoc (a computer-guided mill used to core the femoral head) was introduced in Europe for use in hip replacement surgery, and later the Acrobot was developed for knee replacement and temporal bone surgery. These have yet to receive U.S. Food and Drug Administration approval for use in the United States, largely because of concerns regarding complication rates.
The growing interest in surgical robotic applications, along with ample funding, spawned a number of market leaders in medical robotics, including the companies Computer Motion, Inc., and Intuitive Surgical, Inc. Computer Motion developed the automated endoscopic system for optimal positioning (AESOP) system (Fig. 4A-3), which was combined with Hermes voice-activation movement technology, and has seen limited adoption in laparoscopic surgical procedures. Computer Motion was also responsible for creating the Zeus telerobotic system (Fig. 4A-4).


Computer Motion was eventually acquired by Intuitive Surgical, the Zeus was retired, and the daVinci system has become the industry standard for surgical robotics. The current leading applications include prostate surgery,4 cardiothoracic surgery,5 and advanced gynecologic surgery.6 More than 50% of radical prostatectomies, for example, are performed using the daVinci system.
Robotic Applications in Otolaryngology
A role for this technology in otolaryngology is beginning to emerge, particularly where precision is required or visualization is limited, and there are a number of pioneering contributions. The first otolaryngologic application of robotics occurred as early as 2002 with several reports from the Terris group at the Medical College of Georgia exploring endoscopic neck procedures.7–10 The first human application was described by McLeod and Melder11 with a case report of excision of a vallecular cyst. Hockstein and colleagues further pursued oral and oropharyngeal applications of robotic technology with a stepwise experimental approach.12,13 Finally, interest in robotic skull base surgery has emerged with the work of Hanna and colleagues.14
Experimental Origins
The first use of robotics for otolaryngologic applications was explored in a porcine model of neck surgery that included parotidectomy, submandibular gland resection, and selective neck dissection.8 This work built on previous promising findings for totally endoscopic neck surgery (also described by Terris and collaborators15,16) and provided proof of principle, in that the safety and efficacy of endorobotic neck surgery was demonstrated, and quickly established that advantages in duration of surgery could be easily achieved with the addition of robotic technology.
The first investigative protocol8 was represented by a prospective nonrandomized investigation in a porcine model in which four different types of neck surgery were accomplished using the daVinci surgical system (Intuitive Surgical Inc., Sunnyvale, CA) (Fig. 4A-5
Stay updated, free articles. Join our Telegram channel

Full access? Get Clinical Tree


