13

Stereotactic Surgery
Endonasal sinus surgery is the procedure of choice for most patients with acute or chronic rhinosinusitis that fails to respond to appropriate medical therapy. The close proximity of the ethmoid, frontal, and sphenoid sinuses to the orbit and skull base provides for only a small margin of error. Though rare occurrences, violation into these important surrounding structures may lead to visual disturbances, CSF leak, and even death. Therefore, it is important for the surgeon to continually know the precise location of the surgical instruments. We have previously described the use of various computer-aided (aka image-guided and computer-assisted) devices that provide a precise two- and three-dimensional graphic interface between the operative site, a computer system, and a high-resolution monitor (Fig. 13–1). This interface may utilize an arm-based, infrared, electromagnetic, or sonic sensor system (no longer available) manufactured by several companies. This chapter will address four specific navigational devices: the VTI (Woburn, MA) electromagnetic InstaTrak, the Xomed (Jacksonville, FL) active/passive infrared LandmarX, the BrainLAB (Palo Alto, CA and Heimstetten, Germany) passive infrared VectorVision, and the Stryker (Kalamazoo, MI) active infrared Navigation System.
 Historical Background
Historical Background
Neurosurgeons were the first to use surgical guidance systems. Framed stereotactic units using CT scans were developed in the mid-1970s, and although they provided for instrument trajectory, they did not show real-time instrument localization.1,2 Roberts et al3 were among the first in the English literature to describe a frameless navigational system to “improve the integration of imaging data with the operative procedure.” Radiopaque glass beads were taped to the patient’s head, and a CT scan was performed. The intraoperative computer was linked to a microscope via an acoustical localizer and had an accuracy of ~2.0 mm. Over the ensuing years, other authors have described their own experiences of variations on the same theme.
In the mid-1980s, Schlöndorff et al,4 and others at the University of Aachen, Germany, were some of the first to realize the potential for these same systems to be utilized in otolaryngology for skull base and sinus surgery. Over the course of several articles during the ensuing years, they described their laboratory and clinical experiences with a passive arm-based system, an optical arm-based digitizer, an infrared localizer, and an acoustical probe.
In the mid-1990’s in the United States, Anon and colleagues5,6 reported on the use of the mechanical arm and infrared freehand ISG (Mississauga, Ontario, Canada) Viewing Wand.
Recently, Anon et al7 examined the evolution of computer-aided surgery, and reviewed the different types of localizers currently available.7
 VTI InstaTrak
VTI InstaTrak
The InstaTrak system is an intraoperative computer-aided surgical system that utilizes electromagnetic tracking technology to provide real-time positional feedback of instrument location on prerecorded CT and MR images. The system is composed of a Sun Sparc-5 computer workstation with 20-inch high-resolution monitor, an electromagnetic transmitter-receiver pair with associated electronics, and a plastic headset frame worn by the patient during both the preoperative CT scan and surgery.
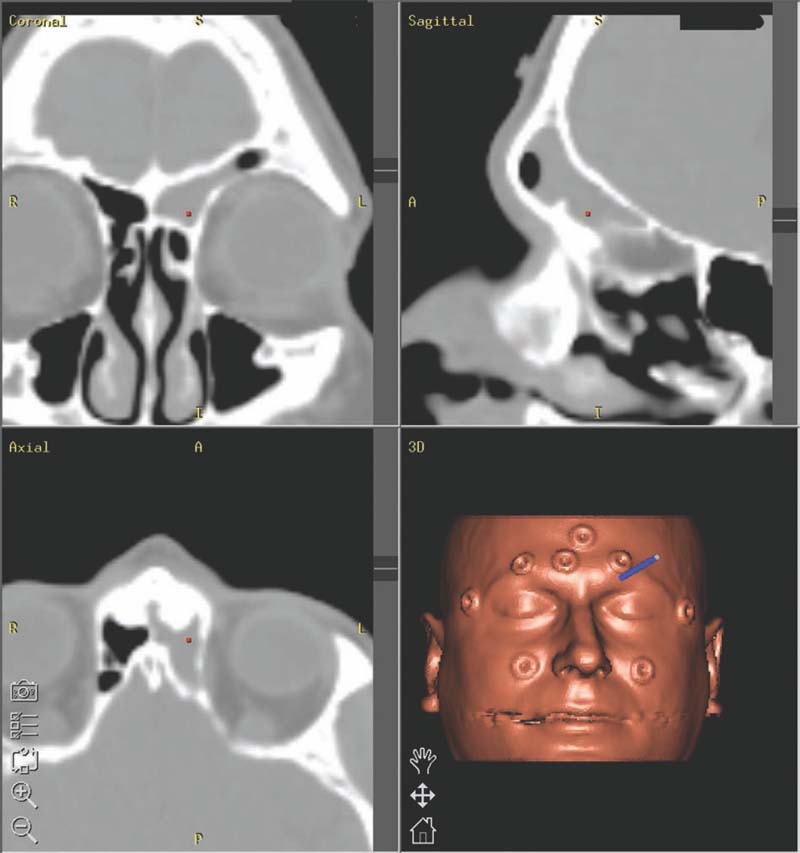
FIGURE 13–1 Medtronic Xomed LandmarX triplanar screen shot of a preoperative scan.
Computer
The Sun Sparc-5 computer workstation uses a Solaris operating system that is capable of simultaneously displaying an original axial CT scan as well as reformatted coronal and sagittal two-dimensional views on a 20-inch high-resolution monitor. The workstation processes position and orientation information from the electromagnetic locating system and in real time displays the instrument tip with respect to the CT images of the patient as a “crosshair.”
Headset
The headset allows for automatic registration of the pre-operative CT images with the electromagnetic tracking system and adjusts the computer’s positioning system with head movement during the surgical procedure. The VTI headset is a molded disposable plastic reference frame with two rubberized earpieces that fit into each external auditory meatus and a double nasal piece that fits onto the nasal dorsum. The headset is placed on the patient prior to the preoperative CT scan and is placed back on the patient at the time of surgery (Fig. 13–2). The design of this headset allows for secure, reproducible positioning of the device each time it is applied on the patient. In a recent study, 25 subjects each had 4 different headsets placed in position by 2 different technicians 4 different times, for a total of 16 applications. These headsets were specially marked with a positional marking system, and each patient had an adhesive millimeter coordinate grid attached to strategic areas on his or her face. The exact position of the headset was able to be determined for each application, and the coordinates were compared. This study showed that the VTI headset can be placed on a patient each time with an accuracy of 0.6 mm (JB Anon, unpublished data).
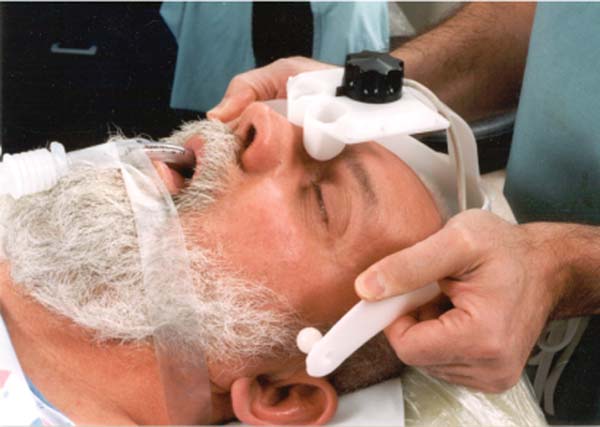
FIGURE 13–2 The VTI headset is placed on the patient. Note how the headset sits on the nose. The ear pieces are rounded and fit into the meatus of the external auditory canal. The black piece is the electromagnetic transmitter.
The headset also contains seven 2.0 mm diameter metal balls affixed into the plastic structure of the headset. After acquiring the preoperative CT scan, the InstaTrak system software automatically searches for the densities of the metal balls, which all need to be within the same plane of scanning. If they are all in position, the computer is able to “autoregister.”
The headset also serves as the attachment point of the electromagnetic transmitter.
Electromagnetic Transmitter and Receiver
All position measurements are made by an electromagnetic location-finding system. In this proprietary system, the electromagnetic transmitter, consisting of a geometric arrangement of coils, serves as a magnetic field source generator. The coils are driven through a series of excitation states to produce a continuously varying magnetic field in the target surgical area. When the receiver (attached to a variety of straight and curved suctions, powered dissectors, and forceps via a docking mechanism) is introduced into the magnetic field, voltages are induced in sensors inside the receiver assembly. The strength and polarity of these signals are determined by the position and orientation (x, y, and z axes, azimuth, elevation, and roll) of the receiver relative to the transmitter. A dedicated computer processor measures these received signals and calculates the appropriate position and orientation of the receiver based on a mathematical model of the magnetic fields and calibration data. The electromagnetic system has a positional accuracy of 0.5 mm and an angular (orientation) accuracy of 0.5 degree.
Radiology
As noted above, the InstaTrak system employs axial, coronal, and sagittal views of the patient’s CT scanned anatomy. The coronal and sagittal views are reformatted by the InstaTrak system from the patient’s single helical scan data taken in the axial plane and transferred to the InstaTrak via a network or media connection.
In radiology, the headset is placed on the patient, and the patient is prepared for an axial plane sinus CT scan. A lateral scout view is taken, and the scan area is defined from the inferior aspect of the maxilla superior to a level ~1.5 cm above the uppermost CT bright metal markers in the headset. The display field of view (DFOV) is ~20 cm and centered about the sella turcica so that all nasal cavity and sinus anatomy is included in the scan.
With the CT scanner’s gantry angle at 0 degree, the archive matrix set to 512, and an axial plane established, a helical 3 × 3 scan of the patient is made. The 3 × 3 scan refers to a 3 mm slice thickness by a 3 mm table movement. The CT data are reconstructed to a 1 mm table increment using a standard bone algorithm. The standard bone algorithm is used to visually enhance the bone tissue as opposed to soft tissue or edges. It is noted that this method of obtaining the required scan data subjects the patient to minimal doses of ionizing radiation compared with an axial scan, where 1 mm slices are individually obtained.
Most CT scanners configure their patient scan data in accordance with a NEMA standard entitled “Digital Imaging and Communication in Medicine,” which is commonly referred to as DICOM 3. The InstaTrak system and its companion workstation, called ConneCTstat, are designed to communicate with and accept DICOM 3 scan data via network transfer. Therefore, the patient’s CT scan data are sent via network transfer to either the InstaTrak or the ConneCTstat systems. Typically, the ConneCTstat resides in radiology, where the scan data transfer takes place. The ConneCTstat reformats the patient’s data to provide all three views (axial, coronal, and sagittal) and writes this data to an optical media cartridge. The media cartridge may then be physically taken to the InstaTrak instrument, typically residing in the operating room or surgical suite, where the patient’s CT data are installed. If the OR is equipped with a network outlet, the patient’s CT data may be pushed directly to the InstaTrak system over the network, making the ConneCTstat workstation unnecessary. It would also be unnecessary if the radiology department and surgical suite were close enough to allow the InstaTrak to be physically taken to radiology for network transfer of the patient’s CT data.
Operating Room
The metal operating room table is shielded from the patient by securing a 6-inch foam pad along the length of the table. Once the patient is anesthetized and intubated (we do our procedures under general anesthesia), the headset with attached electromagnetic transmitter is placed in position, and sterile plastic drapes are applied. Any preparation, injections, and so on are performed, and prior to beginning the procedure, a calibration is performed. The calibration procedure allows the user to correlate the position of the instrument/receiver unit being used to the location of the receiver assembly. This procedure is performed by placing the tip of the instrument in a small dimpled center of the transmitter assembly and activating the “tip offset” button display on the computer screen. The system measures the distance of the receiver from the transmitter from several different orientations and calculates the instrument tip location relative to the receiver. Next, a “drift point” is established by touching the instrument to a set point on the patient’s nose and activating the “drift set point” button on the computer screen. During the operation, an internal timer necessitates checking this “drift point.” If the accuracy changes by more then 2.0 mm, then recalibration is required to maintain consistent accuracy. Calibration and “drift point” setting take approximately 2 minutes.
Surgery commences in the usual fashion, and the instrument/receiver unit is used intranasally to confirm the surgeon’s precise location as shown on the computer screen
Instrumentation
The VTI InstaTrak has been adapted for use with a variety of suctions (straight and curved) and forceps, as well as shavers, such as the Xomed Magnum system. Smaller electromagnetic receivers allow for flexibility and ease of use. A flat-screen touchpad monitor, which can be covered with a sterile drape, is now available. It gives the surgeon a clear view of the operating site as well as control of the computer functions.
 Medtronic Xomed LandmarX System
Medtronic Xomed LandmarX System
The LandmarX ENT Image Guidance System is a dual-modality optical system that utilizes both infrared emitting diodes (IREDs) and reflective passive markers attached to an intraoperative headset and a variety of instrumentation. A camera array, attached on a movable boom to the LandmarX cart, tracks the light emissions from the IREDs or passive markers, then relays that positional information to the computer.
A high-resolution monitor is mounted on the cart on which the surgeon can select one, two, four, six, or nine views: orthogonal views (axial, sagittal, and coronal), various navigational views (based on the actual position of the instrumentation), the endoscopic view, and various three-dimensional models (skull, skin, sinuses, etc.).
Computer
A Silicon Graphics Model R12000 computer processes data at speeds upwards of 2.1 gigabytes per second and utilizes a Unix operating system. There is built-in modem and an uninterruptible power supply (UPS). The modem allows a technical support staff to “talk to” the LandmarX system, thus providing immediate diagnostics, maintenance, and software upgrades. The UPS protects the system in the event of power surges or outages, but more importantly, it facilitates moving the system from one OR suite to another without having to reboot.
Radiology
The patient is not required to wear any device during the scanning process, as anatomical fiducials may be used to register the dataset. Scanning protocol requires axial scans from 1 to 3 mm, contiguous and nonoverlapping. The LandmarX system can utilize scans from either helical (or spiral) or nonhelical CT scanners. MRI datasets may also be used.
The CT datasets may be transferred to the LandmarX system by two methods. First, the system will accept information transferred over a DICOM 3 network. Alternatively, the LandmarX system can be configured with a variety of media drives. So, if a scanner archives to a DAT tape or optical disk, the corresponding drive (s) can be built into the LandmarX system. The tape or disk is then loaded into the system just as a floppy disk is in a personal computer. These scanner interfaces allow for easy interface with off-site scanners and as a backup should you prefer a network interface. There is no need for an off-site workstation, as the LandmarX software performs the multiplanar reconstruction.
Operating Room Setup
The headset is placed onto the patient and secured using an elastic silicone band. The camera array is aimed at the surgical site and placed in its optimum position by using a visual aid on the software screen. The surgeon calibrates the surgical instruments by placing each one into a divot located in the headset. The calibration process is a safety feature that confirms the instrument has not been damaged and conforms to the specifications that have been programmed into the software.
Registration Process
Stay updated, free articles. Join our Telegram channel

Full access? Get Clinical Tree


