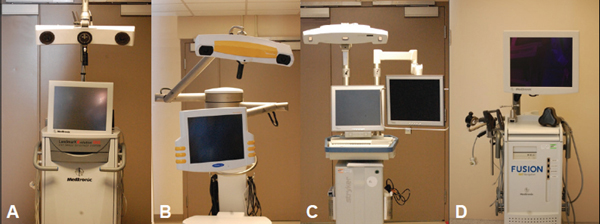
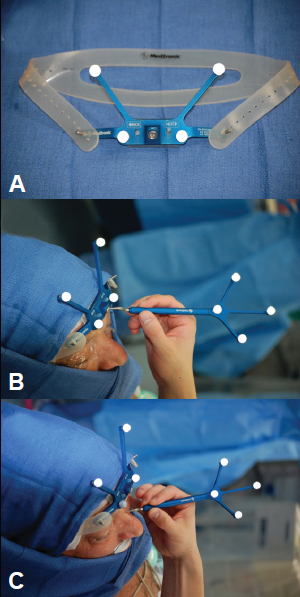
13 Advances in Surgical Navigation Intraoperative image guidance has gained widespread acceptance across many surgical disciplines. These systems allow viewing patient’s anatomy from images acquired before surgery. Computed tomography (CT) and magnetic resonance imaging (MRI), as well as combined imaging techniques have been used for acquiring these images. Although several intraoperative systems exist, feedback is essentially provided to the surgeon in a similar manner. The goal of this chapter is to provide a brief history of image-guided systems and discuss the practical use of image guidance in rhinology and skull base surgery. While the use of image-guidance technology has gained significant acceptance in the past two decades, the concept of image-guided surgery in the field of neurosurgery began in the 1940s. Stereotactic devices were developed to help drain intracranial abscesses and destroy focal areas of the cerebrum causing abnormal motor activity and pain. Guidance devices relied on framed stereotaxy using plain radiography, fluoroscopy, and anatomic landmarks. With advancements in imaging technology, CT was introduced and it quickly became the image modality of choice for framed stereotaxy procedures. Bergström and Greitz developed a head fixation that was placed during preoperative CT imaging and then used intraoperatively to visualize the trajectory of instrument advancement during a procedure.1 Some limitations did exist with this system including unreliable assessment of the depth of instruments and limited surgical access because of the sheer size of the headset. The next step in the evolution of image-guided technology was the elimination of the rigid frame from the headset. Instead of the cumbersome headset used with framed stereotaxy procedures, frameless procedures relied on multiple fiducial markers secured to the patient’s head. These markers were worn by the patient during preoperative imaging and remained in place until surgery. Use of early frameless navigational systems was limited due to poor accuracy. Improvement in accuracy was due to various calibration techniques including mobile joint arms with attached probes, acoustic digitizers, and optical encoded systems. Various computer-aided systems exist for intraoperative imaging. Each system functions by gathering and interpreting either electromechanical, electromagnetic, ultrasound, or optical data. The objectives of computer-aided surgery are to avoid wide-open surgery (the funnel principle) and attempt more minimally invasive procedures (the tunnel principle).2 Common indications for computer-aided systems in rhinology and endoscopic skull base surgery are discussed later in the chapter. Image-guided tracking systems finally evolved into the two main calibration types available today: optical (infrared) and electromagnetic (radiofrequency). The most common optical image-guided tracking systems used today include StealthStation (Medtronic, Minneapolis, Minnesota), VectorVision (BrainLab Inc., Feldkirchen, Germany), and Stryker iNtellect Navigation System (Stryker, Portage, Michigan) (Fig. 13.1A to C). Optical systems use infrared light-emitting diode (LED) technology. These systems have an articulating arm with infrared cameras attached to the main body of the system. Electromagnetic-based systems such as InstaTrak (GE Medical, Waukesha, Wisconsin) and Fusion Navigation System (Medtronic, Minneapolis, Minnesota) have the tracking device attached to the surgical instruments and do not require LEDs (Fig. 13.1D). Figure 13.1 Current optical image-guided workstations. (A) StealthStation; (B) VectorVision; (C) Stryker iNtellect Navigation; and (D) Fusion Navigation. The patient is placed in a supine position with the head closest to the image-guided system (IGS) and video monitor. Images are then loaded onto the image-guidance workstation. A headset is placed and secured with a band on the patient’s forehead at the level of the brow for sinus surgery (Fig. 13.2A). Alternative headsets may be placed anywhere on the head for open procedures via percutaneous fixation. Calibration is completed using the system-provided software and placing the tip of the image-guidance probe in a divot on the headset while the foot pedal is depressed (Fig. 13.2B). Registration is completed by touching the tip of the straight probe to surface fiducials. Alternatives to fiducial registration are available, including surface (Fig. 13.2C), anatomical site, face mask (Fig. 13.3), and laser-emitting surface registration. Figure 13.2 (A) Head receiver and strap for the StealthStation; (B) demonstration of registration probe placement in the divot; and (C) demonstration of active skin surface registration. Figure 13.3 Image of the Stryker iNtellect Navigation System with skin surface registration mask and receiver. Typically, fiducial markers are placed at a minimum of three sites plus the nasal dorsum at the level of the medial canthi, the nasal tip, the columella, and the lateral orbital wall at the level of the lateral canthi during imaging.3 Registration errors may be due to fiducials that have shifted position or become dislodged, the deformation of soft tissues during imaging, and the time between imaging and registration.4 Designs using face masks and laser surface registration overcome limitations in fiducial-based registration as nothing needs to be placed on the patient during image acquisition. Once registered, the procedure may begin. Multiple instruments are available for guidance depending on the desired site of surgery and the image is visualized (Figs. 13.4 and 13.5). Indeed, several systems allow the attachment of a tracking device to almost any instrument allowing a wide array of options for the surgeon. However, the attachment of tracking devices may change the reach and degree of rotation of the instrumentation.
Image-Guided Surgery Systems
History
Current Systems
Optical Systems

Stay updated, free articles. Join our Telegram channel

Full access? Get Clinical Tree


